kategorier: Utvalgte artikler » Hjemmeautomatisering
Antall visninger: 149188
Kommentarer til artikkelen: 5
Prinsippet om drift og det grunnleggende om PLC-programmering
Programmerbare logiske kontrollere (PLSer)
 Før inngangen til solid-state logiske kretser, var utviklingen av logiske kontrollsystemer basert på elektromekaniske reléer. Foreløpig er ikke stafettene utdatert i destinasjonen, men likevel i noen av sine tidligere funksjoner erstattes de av en kontroller.
Før inngangen til solid-state logiske kretser, var utviklingen av logiske kontrollsystemer basert på elektromekaniske reléer. Foreløpig er ikke stafettene utdatert i destinasjonen, men likevel i noen av sine tidligere funksjoner erstattes de av en kontroller.
I moderne industri er det et stort antall forskjellige systemer og prosesser som krever automatisering, men nå er slike systemer sjelden designet fra reléer. Moderne produksjonsprosesser trenger en enhet som er programmert for å utføre forskjellige logiske funksjoner. På slutten av 1960-tallet utviklet det amerikanske selskapet Bedford Associates en dataenhet kalt MODICON (Modular Digital Controller). Senere ble navnet på enheten navnet på enheten til selskapet som designet, laget og solgte det.
Andre selskaper utviklet sine egne versjoner av denne enheten, og til slutt ble den kjent som PLC, eller programmerbar logikkkontroller. Målet med en programmerbar kontroller som var i stand til å simulere driften av et stort antall reléer, var å erstatte elektromekaniske reléer med logiske elementer.
PLS har et sett med inngangsterminaler som du kan overvåke status for sensorer og brytere. Det er også utgangsklemmer som gir et "høyt" eller "lavt" signal til effektindikatorer, magnetventiler, kontaktorer, små motorer og andre selvovervåkende enheter.
PLS-er er enkle å programmere fordi programmeringsspråket deres ligner logikken til et stafett. Så en vanlig industriell elektriker eller en elektrisk ingeniør, som er vant til å lese stiger-logikkretser, vil føle seg komfortabel når du programmerer en PLS for å utføre de samme funksjonene.
Signaltilkobling og standardprogrammering er noe annerledes for forskjellige PLC-modeller, men de er ganske like, noe som gjør at du her kan plassere en "generell" introduksjon til programmeringen av denne enheten.
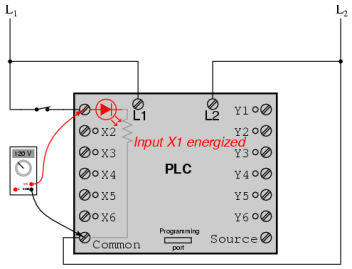
Illustrasjonen nedenfor viser en enkel PLS, eller rettere sagt, hvordan den kan se ut foran. To skrueklemmer for tilkobling av interne PLS-kretser opp til 120 VAC er merket L1 og L2.
Seks skrueklemmer plassert på venstre side gir tilkobling for inngangsenheter. Hver terminal representerer sin inngangskanal (X). Skrueklemmen ("generell" tilkobling) som er plassert i nedre venstre hjørne er vanligvis koblet til L2 (nøytral) strømkilde med en spenning på 120 V AC.

Inne i PLS-huset som kobler hver inngangsterminal til en felles terminal, er det en enhetsisolator (LED) som gir et elektrisk isolert "høyt" signal for datakretsen (en fototransistor tolker LED-lyset) når en 120 volt vekselstrøm er installert mellom den tilsvarende inngangsterminalen og den vanlige terminal. LED på fronten av PLS gjør det mulig å forstå hvilken inngang som er direkte:
Utgangssignalene genereres av PLC-datamaskinkretser, aktiverer en svitsjeanordning (transistor, tyristor, eller til og med et elektromekanisk relé) og kobler “Source” -terminalen (nedre høyre hjørne) til en hvilken som helst utgang merket med en bokstav Y. Kildeterminalen er vanligvis assosiert med L1. Akkurat som hver inngang, er hver utgang som er strømforsynt merket med en LED:
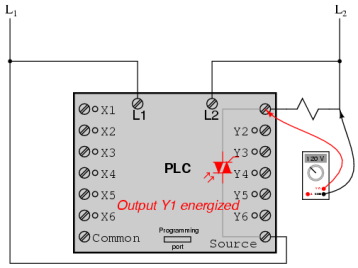
Dermed kan PLS kobles til alle enheter, for eksempel brytere og elektromagneter.
Grunnleggende om PLC-programmering
Den moderne logikken til kontrollsystemet er installert i PLS gjennom et dataprogram.Dette programmet bestemmer hvilke utganger som blir strømforsynt og under hvilke inngangsforhold. Selv om selve programmet ligner en relélogikkrets, er det ingen bryterkontakter eller reléspoler som fungerer inne i PLS for å skape forbindelser mellom inngang og utgang. Disse kontaktene og spolene er tenkt. Programmet blir skrevet og sett ved hjelp av en datamaskin koblet til PLC-programmeringsporten.
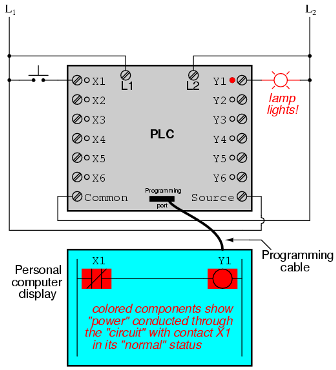
Tenk på følgende kretsløp og PLS-program:
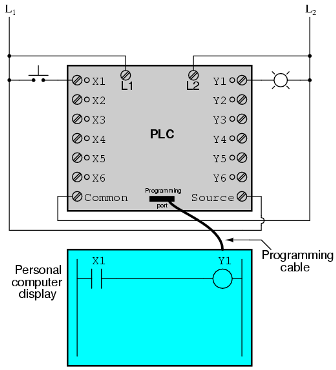
Når trykknappbryteren ikke er aktivert (i av-tilstand), sendes ikke signalet til inngang X1. I samsvar med programmet, som viser den "åpne" inngangen X1, vil signalet ikke bli sendt til utgangen Y1. Dermed vil utgang Y1 forbli uten strøm, og indikatoren koblet til den vil slå seg av.
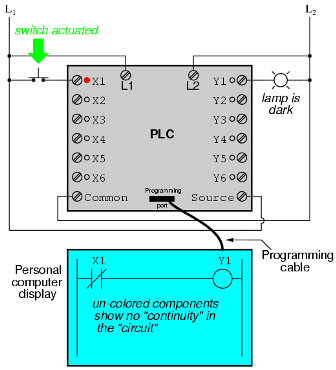
Hvis du trykker på trykknappbryteren, sendes signalet til inngang X1. Alle kontakter X1 i programmet vil innta en aktivert tilstand, som om de er relékontakter som aktiveres ved å tilføre spenning til en reléspole kalt X1. I dette tilfellet vil åpen kontakt X1 bli "lukket" og sende et signal til spolen Y1. Når spolen Y1 får strøm, lyser utgang Y1 med en pære koblet til den.
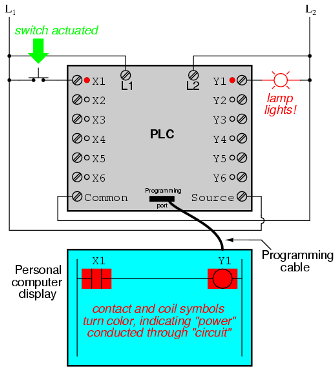
Det skal forstås at kontakt X1 og spole Y1 er koblet ved hjelp av ledninger, og "signalet" som vises på datamaskinens skjerm er virtuelt. De eksisterer ikke som ekte elektriske komponenter. De er bare til stede i et dataprogram - en del av programvaren - og ligner bare på det som skjer i stafettkretsen.
Det er like viktig å forstå at datamaskinen som brukes til å skrive og redigere programmet ikke er nødvendig for videre bruk av PLS. Etter at programmet er lastet ned til den programmerbare kontrolleren, kan datamaskinen slås av, og PLS vil uavhengig utføre programkommandoene. Vi inkluderer en datamaskinmonitor i illustrasjonen slik at du forstår sammenhengen mellom virkelige forhold (bryterlukking og lampestatus) og programstatus (signaler gjennom virtuelle kontakter og virtuelle spoler).
Den virkelige kraften og allsidigheten til PLS avsløres når vi ønsker å endre kontrollsystemets oppførsel. Siden PLC er en programmerbar enhet, kan vi endre kommandoene som vi angir uten å konfigurere komponentene som er koblet til den på nytt. Anta at vi har bestemt oss for å slå funksjonen “bryter - lyspære” omvendt: trykk på knappen for å slå av lyset, og slipp den for å slå den på.
Løsningen på dette problemet under reelle forhold er at bryteren, "åpen" under normale forhold, erstattes av en "lukket". Programvareløsningen er å endre programmet slik at kontakten X1 under normale forhold er "lukket" og ikke "åpen".
I bildet nedenfor vil du se et program som allerede er endret, med bryteren ikke aktivert:
Og her er bryteren aktivert:
En av fordelene med å implementere logisk kontroll i programvare, i motsetning til kontroll ved bruk av maskinvare, er at inngangssignalene kan brukes så mange ganger som nødvendig. Tenk for eksempel på en krets og et program designet for å slå på en lyspære hvis minst to av de tre bryterne er aktivert samtidig:
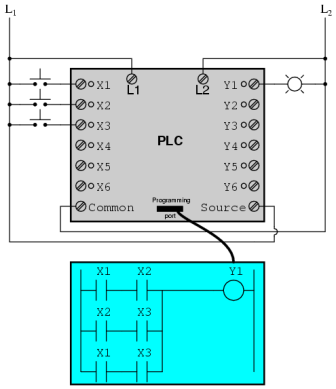
For å bygge en lignende krets ved hjelp av et relé, vil det være nødvendig med tre reléer med to åpne kontakter under normale forhold, som hver må brukes. Imidlertid kan vi ved hjelp av PLC programmere så mange pinner for hver “X” -inngang som vi ønsker uten å legge til noe ekstra utstyr (hver inngang og utgang skal oppta ikke mer enn 1 bit i PLC-digitalminnet) og ringe dem så mange ganger som nødvendig .
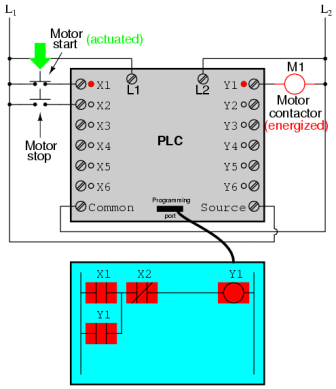
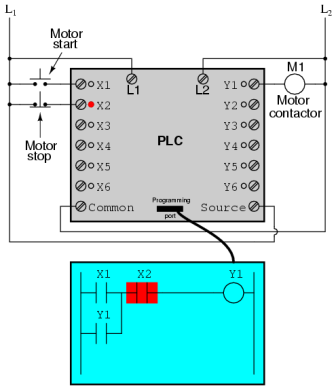
I tillegg, siden hver PLC-utgang ikke har mer enn én bit i minnet, kan vi legge til kontakter til programmet, og bringe Y-utgangen til en ikke-aktivert tilstand. Ta for eksempel et motordiagram med et system for å kontrollere bevegelsesstart og stopp:
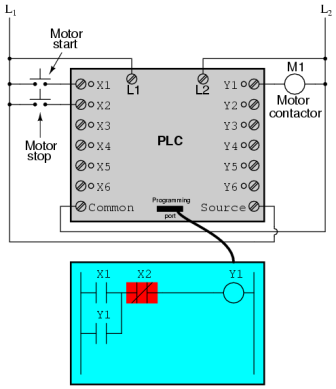
Bryteren koblet til inngang X1 fungerer som “Start” -knappen, mens bryteren koblet til inngang X2 fungerer som “Stopp” -knappen. En annen kontakt, kalt Y1, som å skrive ut på en kontakt, lar motorkontaktoren forbli påkoblet selv om du slipper Start-knappen. I dette tilfellet kan du se hvordan kontakten X2, "lukket" under normale forhold, vises i fargeblokken, og derved viser at den er i "lukket" ("elektrisk ledende") tilstand.
Hvis du trykker på "Start" -knappen, vil strømmen strømme gjennom den "lukkede" kontakten X1 og den vil sende 120 VAC til motorkontakten. Den parallelle kontakten Y1 vil også "lukke", og dermed lukke kretsen:
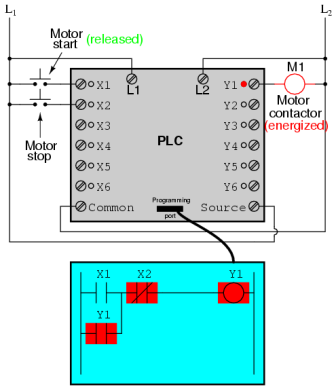
Hvis vi nå trykker på "Start" -knappen, vil kontakt X1 gå i "åpen" tilstand, men motoren vil fortsette å fungere, fordi den lukkede kontakten Y1 fortsatt vil holde spolen spenning:
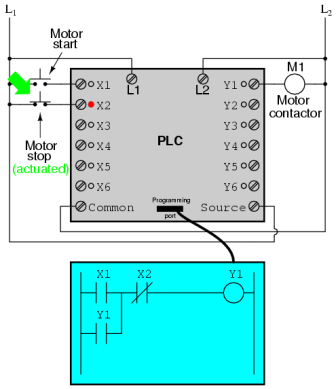
For å stoppe motoren, må du raskt trykke på "Stopp" -knappen, som vil rapportere spenningen til inngangen X1 og den "åpne" kontakten, noe som vil føre til avslutning av spenningsforsyningen til spolen Y1:
Når du trykket på “Stopp” -knappen, ble inngang X1 igjen uten spenning, og returnerte kontakt X1 til normal “lukket” tilstand. Motoren vil under ingen omstendigheter begynne å fungere igjen før du trykker på Start-knappen igjen, fordi utskriften i pinne Y1 har gått tapt:
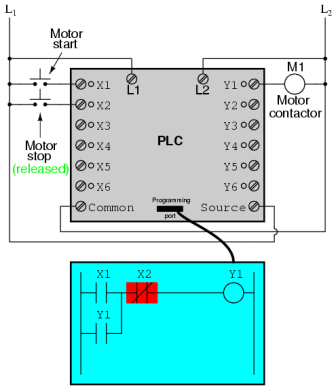
En feiltolerant modell av PLS-kontrollenheter er veldig viktig, som tilfellet er med elektromekaniske relékontrollenheter. Det er alltid nødvendig å ta hensyn til effekten av en feilaktig "åpen" kontakt på driften av systemet. Så for eksempel, i vårt tilfelle, hvis kontakt X2 feilaktig "åpnes", vil det ikke være noen måte å stoppe motoren på!
Løsningen på dette problemet er å omprogrammere kontakten X2 inne i PLS og faktisk trykke på Stopp-knappen:
Når “Stopp” -knappen ikke trykkes, blir inngangen til PLC X2 strømforsynt, dvs. kontakt X2 er “lukket”. Dette gjør at motoren kan starte driften når en strøm kommuniseres til terminal X1, og fortsette driften når "Start" -knappen slippes. Når du trykker på “Stopp” -knappen, går kontakt X2 i “åpen” tilstand og motoren slutter å fungere. Dermed kan du se at det ikke er noen funksjonsforskjell mellom denne og den forrige modellen.
Men hvis inngangsterminalen X2 feilaktig ble "åpnet", kan inngangen X2 stoppes ved å trykke på "Stopp" -knappen. Som et resultat slås motoren av umiddelbart. Denne modellen er tryggere enn den forrige, hvor du trykker på "Stopp" -knappen slik at det er umulig å stoppe motoren.
I tillegg til inngangene (X) og utgangene (Y) i PLS, er det mulig å bruke “interne kontakter og spoler. De brukes på samme måte som mellomreléer som brukes i standard relékretser.
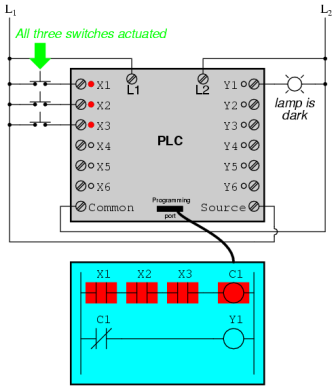
For å forstå prinsippet om driften av de “interne” kretsene og kontaktene, bør du vurdere følgende krets og program utviklet på grunnlag av de tre inngangene til den logiske funksjonen OG:
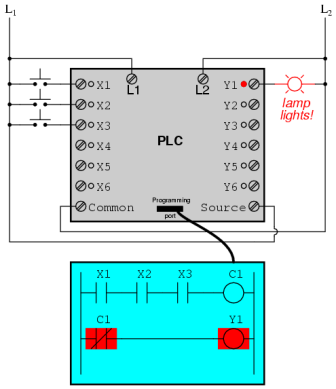
I denne kretsen lyser lampen til en av knappene er trykket. For å slå av lampen, trykk alle tre knappene:
Denne artikkelen om programmerbare logiske kontrollere illustrerer bare et lite utvalg av deres funksjoner. Som PLC-datamaskin kan den utføre andre avanserte funksjoner med mye større nøyaktighet og pålitelighet enn når du bruker elektromekaniske logiske enheter. De fleste PLS-er har mer enn seks innganger og utganger. Følgende illustrasjon viser en av Allen-Bradleys PLS:

Med moduler, som hver har 16 innganger og utganger, har denne PLS muligheten til å kontrollere et dusin enheter.Plassering i et PLS-kontrollskap tar liten plass (for elektromekaniske reléer som utfører de samme funksjonene, vil mye mer ledig plass være nødvendig).

En av fordelene med PLS, som ganske enkelt ikke kan dupliseres ved hjelp av et elektromekanisk relé, er fjernovervåking og kontroll via datamaskinens digitale nettverk. Siden en PLS ikke er mer enn en spesialisert digital datamaskin, kan den lett "kommunisere" med andre datamaskiner. Neste bilde er en grafisk fremstilling av væskefyllingsprosessen (pumpestasjon for kommunal avløpsvannbehandling) kontrollert av en PLS. Dessuten ligger selve stasjonen noen kilometer fra dataskjermen.
Se også på elektrohomepro.com
: